Drone à géométrie variable
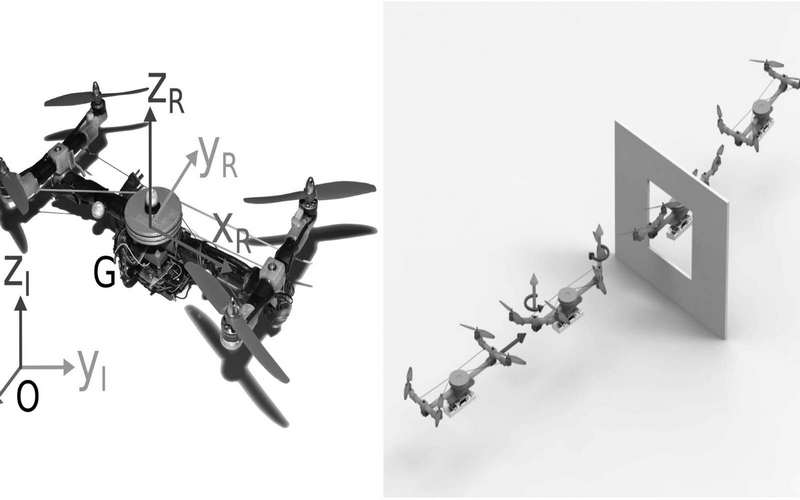
Description: Ce sujet porte sur la conception d’un drone quadrirotor bioinspiré, développé à l’institut des sciences du mouvement. Ce drone s’inspire de l’oiseau et possède la capacité de se replier en vol afin de diminuer son envergure. En fin de repliement, les bras supportant les moteurs et hélices s’alignent le long du corps du drone pour éviter que les hélices ne touchent les bords de l’ouverture.
Ce système est utilisé dans la ressource suivante:
| DS | 2024-01-20 DS4 (Drone à géométrie variable (Concours Commun Polytechnique (CCP) (PSI) 2022)) |